Prenumeruokite mūsų socialinius tinklus, kad gautumėte skubius įrašus
Novatoriškų technologinių pažangų epochoje navigacijos sistemos tapo pamatiniais ramsčiais, skatinančiais daugybę pažangos, ypač tikslumo požiūriu svarbiuose sektoriuose. Kelionė nuo elementarios dangaus navigacijos iki sudėtingų inercinių navigacijos sistemų (INS) įkūnija nenuilstamas žmonijos pastangas tyrinėti ir pasiekti maksimalų tikslumą. Šioje analizėje gilinamasi į sudėtingą INS mechaniką, tyrinėjama pažangiausia šviesolaidinių giroskopų (FOG) technologija ir esminis poliarizacijos vaidmuo palaikant šviesolaidines kilpas.
1 dalis: Inercinių navigacijos sistemų (INS) iššifravimas:
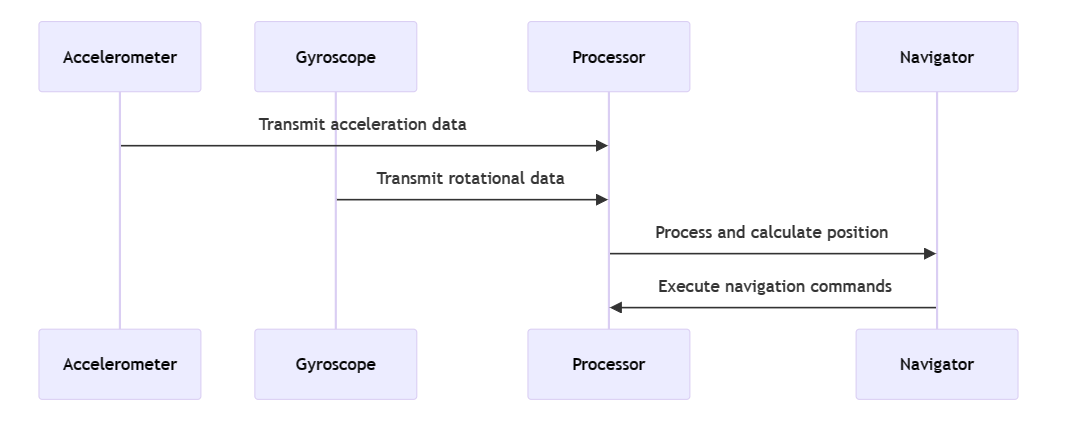
Inercinės navigacijos sistemos (INS) išsiskiria kaip autonominės navigacijos priemonės, tiksliai apskaičiuojančios transporto priemonės padėtį, orientaciją ir greitį, nepriklausomai nuo išorinių signalų. Šios sistemos suderina judesio ir sukimosi jutiklius, sklandžiai integruodamosi su pradinio greičio, padėties ir orientacijos skaičiavimo modeliais.
Archetipinė INS apima tris pagrindinius komponentus:
· Akselerometrai: šie svarbiausi elementai registruoja transporto priemonės tiesinį pagreitį, paversdami judėjimą išmatuojamais duomenimis.
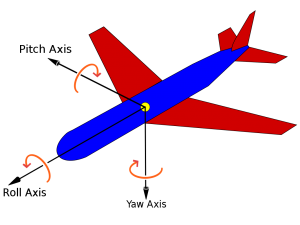
· Giroskopai: šie komponentai yra neatsiejami nuo kampinio greičio nustatymo, jie yra labai svarbūs sistemos orientacijai.
· Kompiuterinis modulis: INS nervų centras, apdorojantis daugialypius duomenis, kad būtų galima atlikti realaus laiko padėties analizę.
INS atsparumas išoriniams trikdžiams daro jį nepakeičiamu gynybos sektoriuje. Tačiau jis susiduria su „dreifu“ – laipsnišku tikslumo mažėjimu, todėl reikalingi sudėtingi sprendimai, tokie kaip jutiklių suliejimas klaidoms sumažinti (Chatfield, 1997).
2 dalis. Šviesolaidinio giroskopo veikimo dinamika:
Šviesolaidiniai giroskopai (FOG) skelbia transformacinę rotacinių jutiklių erą, išnaudodami šviesos trukdžius. FOG, kurių esmė – tikslumas, yra gyvybiškai svarbūs aviacijos ir kosmoso transporto priemonių stabilizavimui ir navigacijai.
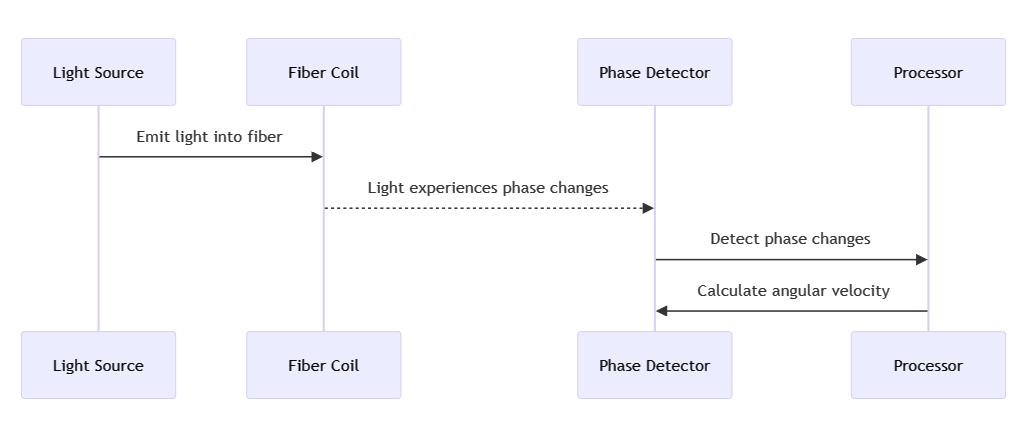
FOG veikia pagal Sagnaco efektą, kai šviesa, sklindanti priešingomis kryptimis besisukančioje pluošto ritėje, sukelia fazės poslinkį, koreliuojantį su sukimosi greičio pokyčiais. Šis subtilus mechanizmas paverčiamas tiksliais kampinio greičio matavimais.
Esminiai komponentai apima:
· Šviesos šaltinis: Pradžios taškas, paprastai lazeris, inicijuojantis koherentinę šviesos kelionę.
· Pluošto ritėSusuktas optinis vamzdelis pailgina šviesos trajektoriją ir taip sustiprina Sagnaco efektą.
· Fotodetektorius: šis komponentas atpažįsta sudėtingus šviesos interferencinius modelius.
3 dalis: Poliarizacijos reikšmė palaikant šviesolaidines kilpas:
Poliarizaciją palaikančios (PM) skaidulų kilpos, būtinos FOG technologijoms, užtikrina vienodą šviesos poliarizacijos būseną, kuri yra pagrindinis interferencijos modelio tikslumo veiksnys. Šios specializuotos skaidulos, kovojančios su poliarizacijos režimo sklaida, padidina FOG jautrumą ir duomenų autentiškumą (Kersey, 1996).
PM skaidulų pasirinkimas, kurį lemia eksploataciniai reikalavimai, fizinės savybės ir sisteminė harmonija, daro įtaką bendriems našumo rodikliams.
4 dalis: Taikymas ir empiriniai įrodymai:
FOG ir INS randa rezonansą įvairiose srityse – nuo nepilotuojamų orlaivių skrydžių organizavimo iki kinematografinio stabilumo užtikrinimo nenuspėjamoje aplinkoje. Jų patikimumą įrodo jų panaudojimas NASA Marso marsaeigiuose, palengvinantis patikimą nežemišką navigaciją (Maimone, Cheng ir Matthies, 2007).
Rinkos trajektorijos prognozuoja sparčiai augančią šių technologijų nišą, o tyrimų vektoriai skirti sistemos atsparumo, tikslumo matricų ir prisitaikymo spektrų stiprinimui („MarketsandMarkets“, 2020 m.).

Žiedinis lazerinis giroskopas
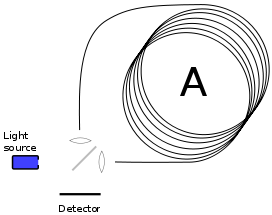
Šviesolaidinio giroskopo, pagrįsto Sagnaco efektu, schema
Nuorodos:
- Čatfildas, Alberta, 1997 m.Didelio tikslumo inercinės navigacijos pagrindai.Astronautikos ir aeronautikos pažanga, t. 174. Restonas, Virdžinija: Amerikos aeronautikos ir astronautikos institutas.
- Kersey, AD ir kt., 1996. „Šviesolaidiniai giroskopai: 20 metų technologijų pažangos“, inIEEE darbai,84(12), p. 1830–1834.
- Maimone, MW, Cheng, Y. ir Matthies, L., 2007. „Vizualinė odometrija Marso tyrinėjimo marsaeigiuose – įrankis tiksliam vairavimo ir moksliniam vaizdavimui užtikrinti“,IEEE robotikos ir automatikos žurnalas,14(2), p. 54–62.
- „MarketsandMarkets“, 2020 m. „Inercinių navigacijos sistemų rinka pagal klasę, technologiją, taikymą, komponentą ir regioną – pasaulinė prognozė iki 2025 m.“
Atsakomybės apribojimas:
- Mes pareiškiame, kad tam tikri mūsų svetainėje rodomi vaizdai yra surinkti iš interneto ir Vikipedijos, siekiant skatinti švietimą ir dalytis informacija. Mes gerbiame visų originalių kūrėjų intelektinės nuosavybės teises. Šie vaizdai naudojami be jokių komercinės naudos tikslų.
- Jei manote, kad koks nors panaudotas turinys pažeidžia jūsų autorių teises, susisiekite su mumis. Mes esame pasirengę imtis atitinkamų priemonių, įskaitant vaizdų pašalinimą arba tinkamą autoriaus nurodymą, kad užtikrintume intelektinės nuosavybės įstatymų ir reglamentų laikymąsi. Mūsų tikslas – palaikyti platformą, kurioje gausu turinio, kuri būtų sąžininga ir gerbtų kitų intelektinės nuosavybės teises.
- Prašome susisiekti su mumis toliau nurodytu kontaktiniu būdu,email: sales@lumispot.cnĮsipareigojame nedelsdami imtis veiksmų gavę bet kokį pranešimą ir užtikriname 100 % bendradarbiavimą sprendžiant tokias problemas.
Įrašo laikas: 2023 m. spalio 18 d.